要点
- Figure 8
- 线性一致性
- 快照安装时的线性一致性保证
Raft的状态机安全性保证方法思路
AppendEntries RPC的一致性检测方法(检查待复制日志的前一条日志是否匹配)保证了日志从leader到follower单向流动。保证了单向流动,我们就需要只需要考虑谁能成为leader的问题。
leader完整性性质:选举时,只有包含所有已提交日志的candidate才能够被选为leader。实现分为两步:
- 实现方式是比较candidate与投票者的日志,candidate的日志必须新于投票者的日志才能够获得投票。然而,仍然存在问题:如果一个leader提交了之前任期的日志,那么这条日志可能会被新的leader截断,即这个新leader并没有满足leader完整性(论文图8的情况)
- 为了解决这个问题,raft不允许leader直接提交之前任期的日志,只允许通过提交当前任期的日志来间接提交之前任期的日志。被提交日志的任期更大,保证了旧任期的日志不会被覆盖。
- 基于上述两个性质,论文对leader完整性性质使用了反证法进行了精确证明。
通过上述性质,所有server的日志都能够保持一致,并且所有被提交的日志都能够被保留(raft的一致性解决的核心问题)。由此,所有的状态机都能够以日志被提交的顺序apply所有被提交的日志,保证了状态机的安全性。
参与者和候选者宕机:
- leader重试指令是安全的。AppendEntries RPC和RequestVote RPC的流程已经被设计为可以重复执行的。
选举超时设定:
broadcastTime << electionTime << MTBF
前一个小于号保证了选举至少需要等待一次RPC调用的往返时间之后才会超时,否则选举将无法进行
后一个小于号保证了选举不会等到节点故障之后才超时,否则已经投票的follower将会发生故障,这一票将失去意义
实现细节
并行go func
在循环使用go func并行发送RPC时需要注意代码的正确性:
go func之后不需要Wait,如果Wait,则外层函数需要等待每个go func都收到响应才能返回
外层函数在调用go func之后需要释放锁,这样go func才能获取锁
go func中用到的可变变量(循环变量,rf的成员)需要拷贝一份,或者通过传参的方式传给go func
go func在调用RPC前尽量不要获取锁,而是通过外层函数拷贝/传参获取参数,以保证RPC尽快发送
go func在调用RPC之后需要获取锁检查响应值,首先需要检查发送者是否仍为对应任期的leader,然后再执行论文中的响应步骤
关于Figure 8
Figure 8的实现需要两部分:
- leader更新commitIndex的时候,必须保证新commit的日志是自己任期的
- 新上任的leader需要提交一条no-op,以快速提交之前任期的log
然而,6.824的测试用例当中规定了上层的每条指令必须出现在log的指定index处,因此no-op无法实现,只能实现第一条。实现第一条之后,Figure 8的正确性也能够保证,而日志提交的速度需要依赖于其他优化手段。
其他细节
Student Guide中还提到了许多细节,需要逐一完善:
- 需要判断响应的任期。响应的任期应该与请求的任期和leader的当前任期均匹配,否则响应就是过期的。
- 机器有可能在持久化快照和持久化日志之间崩溃,导致日志是过期的(包含已经快照的条目)。为此,需要在读取持久化信息的时候截断过期的日志。
- 对leader响应AppendEntriesRPC时nextIndex的更新步长进行优化。
6.824的实现中似乎并不会出现第二个问题。持久化状态和快照的代码如下:
1 | // Save both Raft state and K/V snapshot as a single atomic action, |
在测试环境中,使一个节点崩溃的代码如下:
1 | func (cfg *config) crash1(i int) { |
测试环境在崩溃一个节点时,只是将这个节点从模拟网络中断开连接并删除。至于持久化的数据,则会拷贝一份,供重启节点时使用。可见,节点崩溃时并没有进程层面的崩溃,故SaveStateAndSnapshot函数中由互斥锁保护的两行代码一定会被原子地执行,从而raftstate和snapshot的状态在当前测试环境中一定是匹配的。
KVRaft的线性语义实现思路
线性一致性
线性一致性的解释:线性一致性和 Raft | PingCAP
示例图:
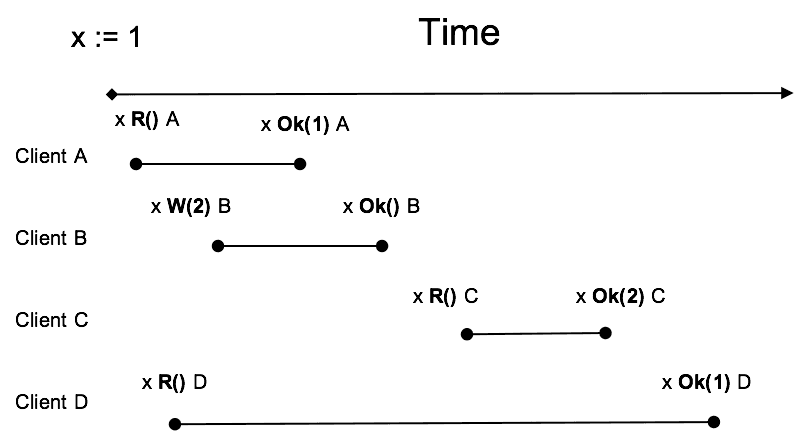
线性一致性的定义为,Client在对同一个数据执行操作(读或写)时满足下列三个条件:
- 瞬间完成(或者原子性)
- 发生在 Inv 和 Resp 两个事件之间
- 反映出“最新”的值
理解:
- 第一和第二条指的是,虽然从Inv到Resp有一段时间,但是操作是在这段时间内的某一个“时间点”完成的。不过线性一致性并没有规定这个点位于线段的哪个位置,可以是Inv和Resp之间的任意位置
- 第三点指的是,如果在某个时间点,数据的值发生了更新,那么这个时间点之后的读操作必须都能读到这个值。例如图中的Client B和Client C,Client C读的时间点肯定位于Client B写的时间点之后,因此C肯定读到2。反之,Client D读和Client B写的先后顺序未知,因此D可能读到1或2。
线性一致性的实现思路:
读请求的处理。需要使用LogRead、ReadIndex、LeaseRead三种方法之一来处理读请求。
- LogRead:读请求需要提交日志。有磁盘开销和网络开销
- ReadIndex:读请求需要:(1) 获得大多数节点的心跳回复;(2) 状态机至少需要apply发起读请求时的commitIndex。没有磁盘开销,有网络开销。
- LeaseRead:(1) Leader选取一个比ElectionTimeout小的租期,在租期内不会发生选举,跳过了ReadIndex的(1)。(2) WaitFree:Leader在上任后提交一条no-op,保证leader的状态机是最新的,从而可以跳过ReadIndex的(2),无需等待commitIndex和lastApplied。
重复请求的处理。Clerk发送的请求有可能是重复的:其他server已经提交了该请求,但是Clerk没有收到响应。这就导致server的状态机可能重复apply一个请求。为此,需要给每个客户端加上UUID,给客户端的每个请求加上序列号,在server中维护每个客户端最新apply的请求序列号。如果从raft接收到重复序列号则不apply,直接给客户端响应ok。
KVRaft快照安装的线性一致性保证
快照的步骤分为两种情况:
- server自己进行快照:server发送index和snapshot给raft,请求快照;raft如果检测到快照是更新的,就截断日志。
- 然而,有的follower可能会由于掉队而缺少快照,这时他需要从leader接收快照:raft接收leader的InstallSnapshot RPC;raft向server上传快照,要求server安装。
在第二种情况中会出现问题:raft在接收到快照之后,在状态机安装快照之前,可能会apply其他更新的log。这时状态机安装快照相当于状态的回退,导致一部分已经被apply的状态丢失,造成missing element。
解决方法是改变安装快照的流程:server向raft发送CondInstallSnapshot询问是否可以安装快照,raft检查到快照在commitIndex之内则拒绝安装。